

“Hyperloop will travel at speeds similar to those of an airplane” – a claim that is reverberating in the world of transportation and hyperloop development. Those speeds will be achieved and maintained with the propulsion subsystem of the pod. This article will discuss two methods for the propulsion of a hyperloop.
Travelling at high speeds has downsides for current modes of transportation. The most significant disadvantage is the increased air resistance, which is proportional to the speed squared. Every time the speed doubles, the aerodynamic drag quadruples. Therefore, making high speed transportation energy inefficient. Since the hyperloop will travel in a near vacuum tube, this aerodynamic drag is reduced to almost zero making high speed transportation more feasible. Moreover, it is possible to make the hyperloop propulsion system completely emission free.
The hyperloop will levitate above the track, in order to propel the pod there has to be an interaction between the pod and the track that results in a forward force. Since there is no contact between pod and track, the interaction has to happen on a distance. The most promising way to realise this is with electromagnetism. In this article two mechanisms to propel a hyperloop are discussed. This does not mean that other options are not valid. The hyperloop will probably make use of contact-less propulsion. Current hyperloop developers are aiming for an emission-free propulsion system and regenerative braking to make the hyperloop future even more promising.
The mechanisms that will be discussed are: Linear Induction Motor (LIM) and Linear Synchronous Motor (LSM).
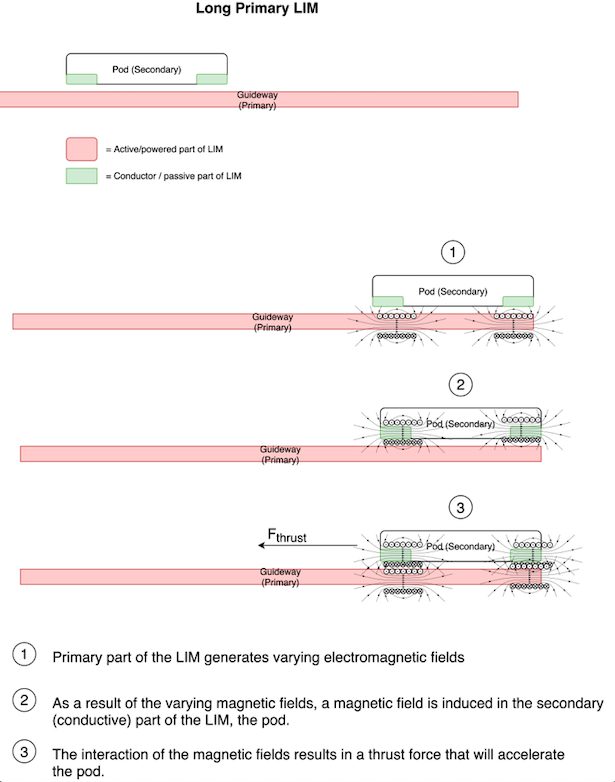
A LIM is similar to a rotary motor but laid out flat over the track, it consists of a primary and secondary part. The primary part generates varying magnetic fields across the air gap. This is similar to the stator in a rotary motor. This magnetic field induces a force in the secondary part, which is a conductor. This secondary is similar to the rotor in a rotary motor. There are two variants of the LIM: short primary (SP) and long primary (LP).
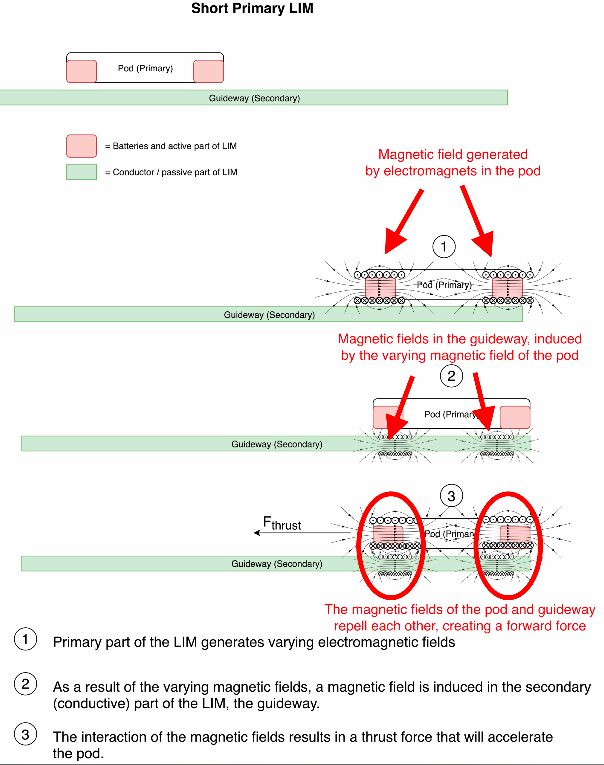
In the SP, the primary is on board of the pod and the secondary is the guideway. The primary on board has to generate the varying magnetic fields and therefore on-board power is required. Moreover, energy losses are higher when the vehicle length is shorter. An SP requires power in the pod to propel, the need for batteries will increase the pod mass to be lifted significantly. An advantage of the SP is that the guideway will be relatively cheap since no active parts are required, only the secondary, a conductor. Three examples of SP Maglevs are HSST (Japan,) Korean Hyundai Rotem (South Korea) and Changsha (China).
In the LP, the primary is in the guideway, therefore requiring a powered guideway. This results in high guideway costs. However, the cost of an individual pod will go down significantly because no active part of the propulsion has to be on the pod, therefore, eliminating large onboard batteries and primary part of the LIM. Since there are fewer energy losses, the LP LIM is able to achieve high speeds efficiently. If a LIM is going to be used for the hyperloop, it will probably be an LP because it can reach speeds above 100 km/h efficiently, the SP cannot achieve this.
General advantages of the LIM is that no gears are required and high accelerations and decelerations are possible to achieve. This could be ideal for cargo transport with the hyperloop.
The second mechanism that could be used for a hyperloop is a Linear Synchronous Motor. Here, the mechanical motion in synchronous with the magnetic field. In contrary to the LIM, the thrust force is not created by an induced magnetic field. An LSM consists of two parts: coils that can generate a travelling magnetic field along with the track and permanent (electro)magnets on the pod. The other way around is also possible but placing permanent (electro)magnets along the whole guideway is not feasible when looking from an economic perspective.
The LSM is proven to be more energy efficient than a LIM because there are fewer losses. Another advantage is that the active part is in the track and no energy has to be transferred (or stored in batteries) to/in the pod. One challenge is that for the LSM to work properly, the exact positions and velocities of the pods in the hyperloop tube have to be known at every moment in time. This can be done by placing sensors in the pods and tube and having pod-to-pod communication as well as pod-to-station communication. LSM propulsion is used by Transrapid and the Shinkansen Maglev.
In this article a brief overview of two potential propulsion mechanisms was given. To conclude, there is a small recommendation on this research.
If it is desired to develop a system that is energy efficient and is able to achieve high velocities (over 1000 km/h), one should opt for LSM. However, the guideway costs and complexity of an LSM propulsion system are higher than those of a LIM. Since the envisioned hyperloop system of Delft Hyperloop must be energy efficient and requires speeds of approximately 1000 km/h, the LSM is the best option for the propulsion system of a hyperloop. Future research must prove the safety and reliability of a LSM systems at high-speeds of 1000 km/h. This should be achieved through extensive testing of the system at a high-speed test facility. Only when safety and reliability are guaranteed, could LSM be a real option for the hyperloop.
8 Responses
Is there any realistic chance of transferring energy efficiently from the track to the pod to reduce the amount of batteries in an active pod solution?
Thank you for the question! Some research has been done into reducing the amount of batteries in an active pod solution through the transfer of energy to the pod. However, LIM is already less energy efficient than LSM. So transferring the energy from the track to the pod would lower the efficiency even further. This is the reason why existing MagLev trains use either LSM or long primary LIM.
There’s another new technology alternative to batteries that is better, less weight and more power.
Hey Tom, Could you tell us about this alternative new technology?
You’ll hear it before end of year. I’ll make a trip to Toronto and demonstrate it. I’ll contact you.
Sorry, I think I mixed up this for a hyperloop company in Toronto.
I have a question about the LIM propulsion: how do the two opposing magnetic fields generate a perpendicular thrust force relatively to the magnetic fields of the primary and secondary? Has it something to do with the Lorentz-force or so?
Should we use a LIM or a LSM for the propulsion system? Why?